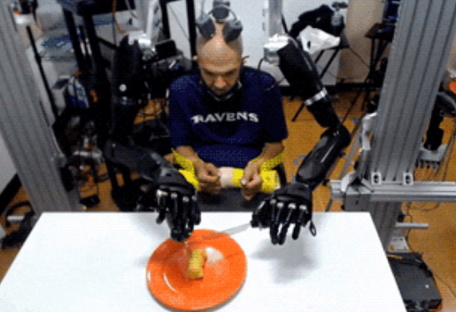
Американські дослідники навчили паралізованого пацієнта керувати роборукою за допомогою зчитування активності його моторної кори через імплантовані мікроелектроди.
Коротко про розробку розповідається на сайті Університету Джонса Хопкінса.
Чоловік зміг піднести руки з вкладеними в них приладами до тарілки з тістечком, розрізати його і піднести відрізаний шматок до рота.
Один з найефективніших способів взаємодії з навколишнім світом для паралізованих людей - нейрокомп'ютерні інтерфейси: якщо моторні відділи головного мозку залишилися недоторканими, зчитувальні з них сигнали можна використовувати, наприклад, для управління комп'ютером. Найчастіше, однак, мова йде про виконання якихось простих дій на зразок пересування курсору або натискання на клавіші, хоча деякі дослідницькі групи активно намагаються зробити і такі інтерфейси, які б дозволили керувати зовнішніми маніпуляторами - протезами і робо-рукою.
Наприклад, два роки тому дослідники з Лабораторії прикладної фізики Університету Джонса Хопкінса під керівництвом Франческо тенор (Francesco Tenore) імплантували в область сенсомоторної кори мозку Роберта Хмільовський (Robert Chmielewski), пацієнта з паралічем всіх кінцівок, пластини з 96 мікроелектродів, які дозволяють не тільки зчитувати моторні сигнали, але і стимулювати сенсорну кору. За допомогою них дослідники планували навчити Хмільовський користуватися двома роборуками - причому не тільки керувати ними, а й відчувати те, до чого роборуки торкаються.
Тоді Хмільовському вдалося навчитися рухати робо-рукою трохи менше ніж за рік, а зараз він вже встиг освоїти і більш точні дії - справлятися з ножем і виделкою. Зчитуючи сигнали з моторної кори, комп'ютер посилає їх в робо-рукою - так ними можна рухати і навіть регулювати, наприклад, розмір шматка, який треба відрізати, переносячи ніж ближче або далі.
Подробиць про те, як саме працює інтерфейс, відомо дуже мало, але зазвичай подібні пристрої працюють на основі алгоритму, який вчиться зчитувати і розпізнавати активність, яка з'являється у відповідь на подання певної дії, і використовувати її далі для управління робо-рукою.
Нагадаємо, раніше на Realist повідомлялось про робота для сліпих.