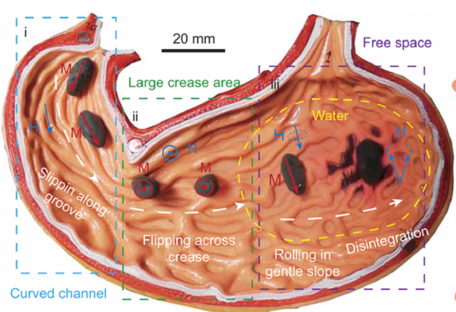
Китайські вчені розробили магнітне покриття, яке можна наносити на багато матеріалів. Це дозволяє створювати мініатюрних роботів, керованих магнітним полем - при тому «програмувати» можна кожну окрему ділянку. Інженери сконструювали кілька моделей роботів і перевірили працездатність одного з них в шлунку кролика. Стаття опублікована в журналі Science Robotics.
Роботи розміром з комах можуть допомогти там, куди людина проникнути не в змозі - наприклад, в живі органи. Щоб навчити таких роботів пересуватися, вчені використовують безліч природних моделей руху: крокування павуків, реактивні скорочення тіла медуз і повзання черв'яків і змій. Мініатюрних роботів, як правило, роблять на основі пасивних конструкцій, якими можна управляти зовнішніми стимулами, наприклад, магнітним полем.
Щоб робот міг взаємодіяти в різних умовах, потрібно вирішити дві ключові проблеми - неможливість модифікувати робота після складання і вузькі проходи, через які робот може не пролізти разом з вантажем.
Сюн Ян (Xiong Yang) з колегами з Міського університету Гонконгу поставив собі за мету спростити процес отримання мілліроботов. Вчені запропонували напилювати спрей, що складається з полівілінового спирту, глютену (який зміцнює плівку і підвищує адгезію до пухким поверхонь) і магнітних залізних частинок, на поверхню каркаса робота. Отримані мініатюрні роботи можна керувати за допомогою магнітного поля.
Вони вибрали склад, в якому співвідношення глютену, магнітних частинок і полівінілового спирту становить 1 до 8 до 11 відповідно. З сопла розпилювача спрей вилітав зі швидкістю, яка доходить до метра в секунду. Підсумкова тонка плівка на поверхні каркаса мала товщину в 500 мікрометрів. Такий склад добре наносився на різні поверхні: полідиметилсилоксан, скло, папір, пластик і дерево.
"Перепрограмувати" напрямок намагніченості робота не складає великих труднощів - потрібно намочити тонкий шар водою і прикласти магнітне поле в 200 міллітесла.
Складні роботи в формі орігамі вже кілька років цікавлять фізиків з точки зору управління їхніми ділянками окремо від інших. Три роки тому американські вчені сконструювали трикутного робота-орігамі, на місцях згину якого знаходилися невеликі електричні схеми - кожну ділянку управлявся окремо в залежності від частоти змінного магнітного поля.
Модель, яка дозволила подорожувати в часі.