Швейцарские инженеры научили 12-винтовой дрон с вращающимися роторами выполнять сложные движения и при этом поддерживать энергоэффективность полета или выполнять другую вторичную задачу. Новый алгоритм контроля полета основан на применении в качестве команд рывков, а не ускорений винтов.
Препринт опубликован на arXiv.org.
Большинство мультикоптеров имеет конструкцию квадрокоптера с фиксированными роторами. Эта конструкция проста в производстве и управлении: чтобы повернуть или наклониться в нужную сторону, нужно просто поменять величину и соотношение тяги на четырех винтах. Но из-за этого она имеет низкую эффективность, а также ограничения на то, в каких положениях может стабильно находиться корпус.
У фиксированных мультикоптеров есть альтернатива в виде мультикоптеров с поворотными роторами, которые могут располагаться отдельно по одному ротору на плечо, а могут быть сдвоенными и противонаправленными. В таких аппаратах вектор тяги можно задавать для каждого ротора или пары роторов отдельно, что потенциально позволяет добиться гораздо большей маневренности и контроля за положением корпуса, как в случае с дроном-инспектором. Но пока область алгоритмов контроля полета всенаправленных дронов развивается и достаточно совершенные конструкции сдержаны в возможностях алгоритмами.
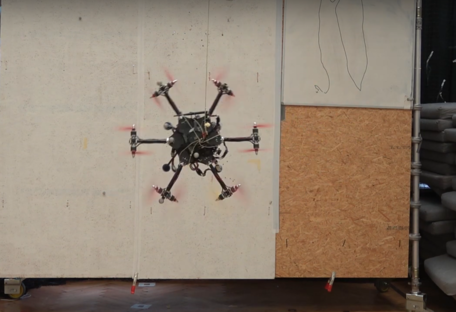
В 2019 году швейцарские инженеры под руководством Хуана Ньето (Juan Nieto) из Швейцарской высшей технической школы Цюриха представили 12-роторный мультикоптер со спаренными поворотными роторами. Они создали для него эффективный алгоритм, позволяющий точно управлять положением эффектора на дроне. Теперь они создали новый универсальный алгоритм управления полетом, позволяющий дрону стабильно находиться в практически любом положении.
Он основан на линейно-квадратичном регуляторе, причем он дает команды не в виде ускорений, а в виде линейных и угловых рывков (эта вектроная величина показывает скорость роста ускорения). Помимо следования заданной траектории алгоритм одновременно может выполнять вторую задачу, оптимизируя движения, чтобы удовлетворять условиям их обоих. Например, второй задачей может быть отслеживание энергоэффективности полета или минимизация закручивания страховочного кабеля. Кроме того, алгоритм справляется с возникающими при такой конструкции вырожденными кинематическими конфигурациями.
Инженеры опубликовали видео с испытаниями, в котором видно, как дрон выполняет сложные маневры, повторяя корпусом заданную траекторию. Например, в одном из полетов дрон сделал круг, находясь в перпендикулярном поверхности состоянии и непрерывно вращаясь.
Ранее сообщалось, что в Китае испытали крупнейший в мире беспилотный транспортный самолет FH-98.