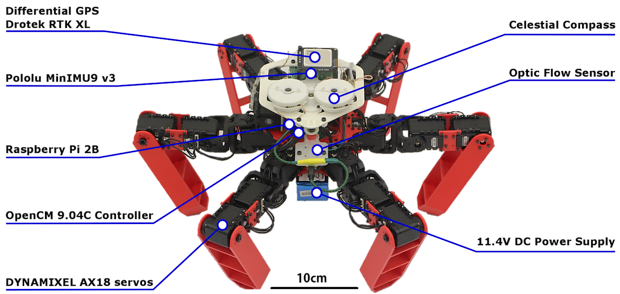
Французские инженеры создали робота, который использует для навигации методы муравьев, обитающих в пустынях — разработчики научили его находить путь домой с помощью подсчета шагов, измерения оптического потока во время ходьбы, а также определять направление по излучению Солнца.
Об этом говорится в статье, опубликованной в Science Robotics.
Эксперименты показали, что робот способен успешно возвращаться в исходную позицию кратчайшим путем, даже если до этого он двигался случайным образом
Большинство современных устройств и видов транспорта использует для точной навигации сигналы спутниковых систем. Поскольку эти сигналы могут быть недоступны, инженеры разрабатывают системы, способные действовать автономно.
К примеру, ракеты, космические аппараты и другие маневренные летающие объекты зачастую оснащаются инерциальной системой навигации, позволяющей рассчитывать пройденный путь и направление по показаниям гироскопов и акселерометров. Кроме того, исследователи продолжают искать, в том числе и у живых организмов, другие способы навигации.
Одни из самых известных животных, обладающих надежной и разносторонней системой навигации — муравьи. Как правило, они используют для поиска пути домой следовые феромоны, оставляемые во время движения.
Однако, этот метод работает не во всех условиях. К примеру, в жарких пустынях выделяемые муравьями феромоны просто разрушаются под действием солнечного света и тепла.
Вместо маркировки пути веществами муравьи, обитающие в пустынях, такие как Cataglyphis fortis и Melophorus bagoti, используют комбинацию нескольких методов. На больших расстояниях они используют метод интегрирования по траектории, позволяющий рассчитать кратчайший путь домой.
Для этого они подсчитывают пройденные шаги, оценивают оптический поток (скорость движения поверхности относительно сетчатки) и рассчитывают направление по высоте Солнца и поляризации рассеянного излучения неба, которая зависит от времени суток.
Когда муравей приходит к концу пути с помощью интегрирования по траектории, для поиска входа в муравейник он использует визуальные признаки (наиболее выделяющиеся объекты).
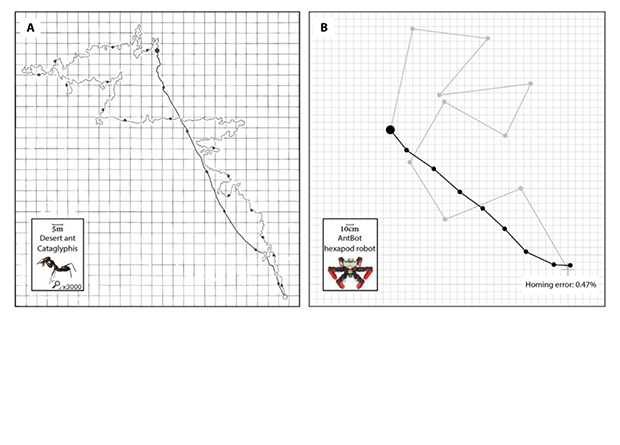
Эксперименты показали, что при использовании наиболее полного алгоритма робот успешно возвращался в исходную позицию со средней ошибкой 0,67 процента.
Авторы отмечают, что во время экспериментов робот проходил около 14 метров, поэтому результаты экспериментов нельзя назвать полностью повторяющими результаты движения настоящих муравьев.
Если учитывать размер, скорость движения и пройденную дистанцию, то в аналогичных условиях робот должен пройти более 30 километров, чтобы сравняться с муравьями, проходящими несколько сотен метров.
Читайте также: Аналитики из британской компании IHS Markit предположили, что через 50 лет роботы могут напасть на людей.