Роботы Boston Dynamics — не единственные устройства, копирующие движения настоящих животных. Немецкий производитель Festo ранее представил миру бионических стрекозу, кенгуру и пингвина. Теперь он вернулся с двумя новыми творениями — кувыркающимся пауком и летучей лисицей с автопилотом.
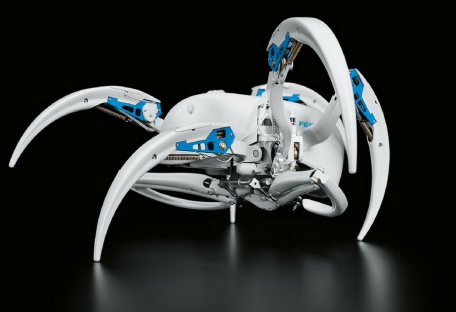
Робопаук BionicWheelBot
У робота BionicWheelBot есть живой прототип — живущий в пустыне Сахара паук вида Cebrennus rechenbergi. В случае опасности он может передвигаться кувырком, что в два раза быстрее обычного бега.

Размеры устройства — 57×80 см, высота — 24 см. У него восемь ног, шесть из которых он использует для ходьбы, а двумя оставшимися отталкивается для кувырка. В это время его ноги складываются в два колеса. Встроенный инерционный датчик позволяет роботу «понять», в каком он положении, чтобы оттолкнуться снова.

Как и живой прототип, в таком режиме паук передвигается гораздо быстрее — в том числе и по наклонным поверхностям.
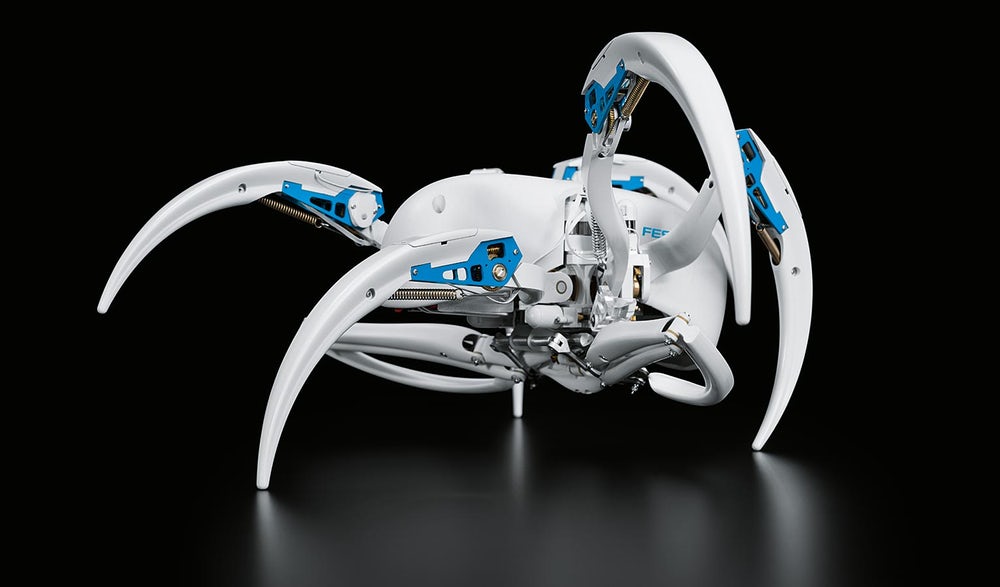
BionicWheelBot оснащен 15 моторами и дистанционно управляется с помощью планшета.
Летучая лисица BionicFlyingFox
Этот робот также вдохновлен реальным животным — летучей лисицей из семейства крыланов. Он весит 580 г, длина его тела — 87 см, а размах крыла — 228 см. Его крылья покрыты сплошной мембраной, состоящей из двух воздухонепроницаемых пленок и трикотажной эластичной ткани, спрессованных вместе.

Ткань имеет узор в виде сот, которые останавливают распространение мелких трещин. Это означает, что робот может летать даже при незначительном повреждении мембраны.

В корпусе робота установлен аккумулятор и вращающийся мотор, который приводит крылья в движение. За взлет и посадку все еще отвечает человек, но в полете им управляет автопилот. Он оснащен двумя наземными инфракрасными камерами, которые автоматически поворачиваются и наклоняются, следуя за светодиодами, расположенными на ногах и крыльях BionicFlyingFox.

Изображения с камер отправляются на центральный главный компьютер, который, в свою очередь, действует как контроллер движения. Основываясь на текущей ориентации робота и его местоположении, компьютер планирует маршрут полета и передает команды BionicFlyingFox. Движения крыла, необходимые для выполнения этих команд, вычисляются самим роботом с помощью бортовой электроники.