Американские инженеры разработали летательный аппарат, использующий в полете движения крыльев, похожие на те, которые применяют колибри.
Инженеры описали разработку в трех статьях, опубликованных на arxiv.org.
Одна из особенностей робота заключается в том, что он может обнаруживать столкновения с препятствиями или приближение к полу благодаря изменению силы тока в электродвигателях, приводящих в движение крылья.
Колибри известны своей уникальной техникой полета, позволяющей им совершать маневры, недоступные многим другим птицам. К примеру, они способны зависать на месте, а также двигаться вверх, вниз или даже назад.
Во время полета крыло колибри постоянно находится в расправленном положении и описывает в воздухе восьмерку во время каждого цикла. Благодаря повороту плоскости крыла оно производит подъемную силу при движении как вперед, так и назад.
Синьянь День и ее коллеги из Университета Пердью создали робота, использующего в полете похожий механизм, а также способного отслеживать окружающую обстановку с помощью двигателей без дополнительных датчиков. Робот имеет симметричный корпус с двумя электродвигателями постоянного тока.
Каждый двигатель связан с верхней жесткой балкой, на которой закреплено мягкое полимерное крыло. Во время полета крылья робота совершают колебания на частоте 34 герца, что сравнимо с частотой взмахов крыльев настоящих колибри.
Инженеры продемонстрировали как робот может зависать в воздухе и перемещаться в нужную точку. Кроме того, они показали, как конструкция и алгоритмы робота позволяют ему справляться с нештатными ситуациями. Например, на демонстрационном видео можно видеть, как робот совершает стабильный полет при разной длине крыльев и даже при разрушении конца крыла прямо в полете.
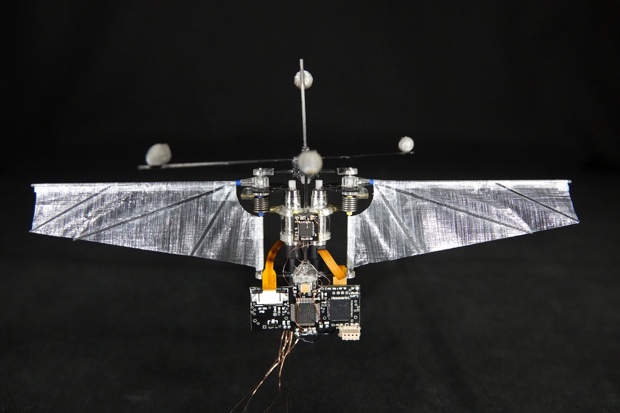
Фото: робот-колибри (Purdue University)
Главная особенность робота заключается в механизме отслеживания окружающей обстановки с помощью электродвигателей. Для этого разработчики создали алгоритм, который отслеживает ток, потребляемый двигателями. На основании этого орнитоптер может определять близость к полу благодаря возникающей дополнительной подъемной силе из-за экранного эффекта.
С помощью этого алгоритма инженеры научили робота летать на одной высоте независимо от рельефа. Кроме того, он способен обнаруживать столкновение с препятствием и его примерное расположение относительно корпуса, отслеживая соотношение тока на обоих двигателях и его резкое изменение на одном из них.
В нынешней реализации робот получает энергию и команды через провод, а его положение отслеживается с помощью внешних камер и инфракрасных маркеров. В то же время инженеры отмечают, что во время испытаний робот поднимал в воздух груз с массой, превышающей его собственную, поэтому его в перспективе можно будет оснастить и для автономного полета, добавив соответствующее оборудование.
Как сообщал Realist, блогер Майкл Ривз модернизировал робота-пылесоса Roomba и заставил его ругаться при столкновении с препятствиями.





